バス動力化(その2) [バス]
https://youtu.be/kGspPUtOtDU
HOサイズのバスを動力化する究極の方式は、今のところ、以前キーエンスから発売されていたHOサイズのトラックのようなラジコン制御と考えますが、そのほかにもいくつかの方式があります。以下では私が知っている、あるいは思いついたバス動力化の方式をいくつかご紹介します。
また、それぞれの方式によるバス走行の再現性の程度を私なりに評価したBus model Motorization Index (バス模型動力化指数、略称BMI)を付記します。ちなみにBMIっていうと肥満の数値みたいですが、ご推察のとおりそれのモジリです。
BMIの基準となるバス走行の再現性は、まず走ることを前提としたうえで、以下の条件をどれだけ満たしているかを判断して適当に決めています。
(a) ゴムダイヤで路面を蹴って走る。
(b) 起動、停止、前進、後退、速度など(以下「速度制御」とします)を自分で制御できる。
(c) 右折、左折など(以下「操舵制御」とします)を自分で制御できる。
(d) カーブを通過する際に、前輪が操舵される。
(e) カーブを通過する際に、前後輪に内輪差を生じる。
(f) その他、バスらしい走りをする。
そして動力化していない状態をBMI=0、現状の最高レベルをラジコン制御のBMI=7として、バス走行の再現性のレベルを評価しました。
(1) レールバス式(BMI=1)
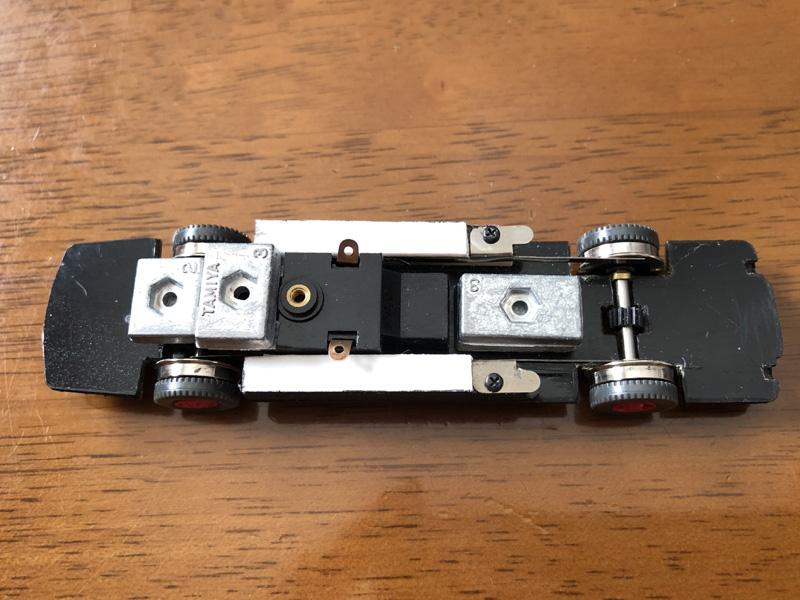
前回の記事を見た友人のよっしぃ氏が「これぞホンマのレールバスやなぁ」と評していますとおり、バスの前輪と後輪にそれぞれ鉄軌道用の車輪を仕込んだ今回の私の試みは、レールバス式ということができます。
このレールバス式は、(b)の速度制御こそ可能ですが、そもそもレールがないところでは走行できませんので、(c)の操舵制御はできませんし、レールから車輪で確実に集電して走るために(a)も無理(私のバスも、実はタイヤが路面から少し浮いています)。
また、脱線しないために(d)(e)も不可。ということで走りもレールバスそのものですので、BMIは1としました。
2023-03-01 14:06
nice!(20)
コメント(0)




コメント 0